
在一个雨下得比依萍找她爸要钱那天还大的后半夜,你孤身一人驾驶着先进的智能电动车,行驶在狭窄漆黑的二级县道上,目的地是200公里外的老家。尽管表显220公里的剩余续航看上去足够撑到终点,但纯电车天生的“虚弱体质”让你一阵阵心慌。
短暂的心理斗争后,你决定驶入距离最近的服务区,进行补能。
半小时后,你开进服务区,展现在面前的,是泥泞不堪、没有雨棚的充电车位,污垢包浆、四散在地的充电线缆,以及不下车靠近就根本无法确认是否正常工作的充电桩。
风越刮越烈,雨越下越大,水洼越积越深,续航里程越停越少。这时的你,面临两个选择:*,下车拔枪充电,淋成落汤鸡肯定没跑,还能“附赠”一手一腿的黄泥;
第二,果断开车走人,“赌”下一个服务区的充电条件,会比这里好。
进退维谷的你,心中升腾起一个想法:要是能有“人”,帮我拔下这把枪,充上这个电,该多好啊。
事实上,早在 2018 年,中国智能电动车公司蔚来,就用真实的人,通过“一键加电”这种途径,打通了“替您补能”的服务闭环。用户只需在 APP 上下单,然后耐心等待服务专员到来即可。“加电小哥”会严格遵照云端大数据计算出的*补能手段,或是开去充电,或是去换电站换电,或是开着奶爸车上门充电。

“一键加电”体验非常不错,可痛点也很明显:用户要离开自己的爱车,去别处熬过这段补能时光。尽管蔚来反复强调,会“确保在最短时间内完成加电”,但在前述暴雨+泥地场景下,用户下车后去哪里,怎么去是个问题;而对用户来说,花近 200 元人民币专门呼叫一个人大老远跑过来,只做一个“拔枪”动作,不仅浪费资源,也免不了被人指摘这样的行为有些过于“小布尔乔”式的矫情。
那么,有没有一种补能方式,可以一次性解决用户“枪脏线重”、“必须离车”、“操作繁琐”的使用痛点,并且颠覆当下“车要找桩”的充电底层逻辑呢?
有,而且办法很简单,换一个“人”就完事了。
这个“人”就是既没有情绪波动,也不要一毛钱加班费的“机器人”。
还得是马斯克
2015 年 2 月,44岁的埃隆·马斯克选择打开自己的“潘多拉魔盒”,释放了可能是历史上*“行业破坏力”的一台跑车—— Tesla Model S P85D 。其 3.3 秒的百公里加速能力不仅让全世界人民在加速瞬间激动得涨红了脸,也让那些殿堂级的燃油超级跑车制造商羞红了脸。更重要的是,Model S P85D 让不少“燃油脑袋”的刻板认知碎了一地:原来,造一台贴地飞行的 supercar ,并不像他们在纪录片里说得那样难。
不过,这只是马斯克让现代汽车工业从燃油进化到纯电过程中的一小步。我们知道,彼时的纯电车受限于电池性能,续航里程大多寒碜得不忍直视,百万级 Model S P85D 字面上的 NEDC 续航也没超过 500 公里。“冒险家”马斯克当然不愿原地坐等电池技术突破性进展带来的续航提升,他开始从另外一条路上寻找答案。
这条路,就是充电。
在回复一位推特热心网友的提问时,老马描绘了这样一种未来出行场景:坐进特斯拉,说出要去的地方,车会自动行驶到该地点。随后,你去上班、购物、打网球,车会评估当前电量状况和后续出行需求,自动寻找最近的可用充电桩,开过去,停进专属车位,充电盖打开,充电线自动插进充电口开始补能。结束后,充电线自动拔出归位,车辆自动驶离。
一句话总结就是:把车停稳,剩下的交给特斯拉。
这样的出行体验,别说 2015 年了,就算是现在听到,也依旧觉得令人无限向往。想让科幻电影中的场景落地,其实除了宏大的自动驾驶叙事外,一条外形“The Terminator”味儿爆表的多关节机械臂,才是能闭环整个过程的领衔主演。
马斯克给这条机械臂起了一个很赛博朋克的名字:Snakebot Autocharger Prototype,蛇形自动充电机器人原型机。
正如下面这张可能会引起部分人不适的动图展示的那样,固定在地面(理想状况是墙面)上的蛇形充电机器人在监测到车辆入位后,充电头会主动寻找充电口进行对接充电。
全程无需一位真实的人类参与,既没有一脸焦虑的车主,也没有没有笑容可掬的补能小哥,有的只是机器和机器之间静谧无声的连接通讯,传输能量,大爱无疆。
虽然这条蛇形自动充电机器臂全程只做了“找、插、充”,可这三个动作一点也不“简单”,其难度甚至高到特斯拉直到今天都无法将这条机械臂量产。
首先,这条蛇形自动充电机器臂有二十个关节。关节多的好处是自由度高,坏处是设计、制造、算法难度成倍增长。而常见的量产垂直串联多关节机器人只有六个关节,数量是特斯拉蛇形自动充电机器臂的三分之一。
其次,像特斯拉这样把多节机械臂放在固定基座上的做法,对电机的要求过于“变态”。因为多节机械臂电机的承重随电机数目和到末端的距离呈线性增长,基座上的第二个电机在承重的同时,还要控制体积,几乎是不可能量产的臆想。如果投入使用后,充电次数多,需要频繁调用机械臂,对制造材料的耐磨要求又会随之提高。这就要电机必须同时满足“重量轻、体积小、高耐磨”的魔鬼三角。
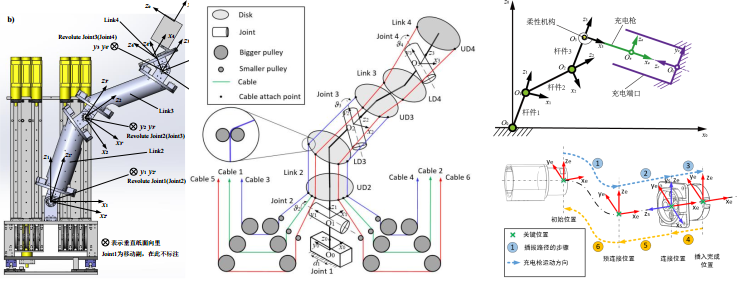
最后,让充电枪对准充电口的全程,不亚于一次汽车的自动驾驶。用激光雷达确定待充电车与机器人本体的位置,用摄像头确认充电口所在的位置,再用 3D 摄像头捕获三维位置数据,与摄像头获取的二维视觉数据进行融合,确保“一插即中,不偏不倚”。
在反复权衡后,特斯拉虽然明面上没有说自己放弃自动充电机器人,但在技术路线的选择上,马斯克的态度已经非常明确。就在这个 6 月,特斯拉收购了成立于 2016 年的德国无线充电系统专业企业 Wiferion ,该公司的核心业务是制造非接触式感应充电器,即大家熟知的“无线充电”。
即便是对机器人有无限热情的马斯克,最终的选择也是将自动充电机器人束之高阁,是不是意味着这条技术路线走不通?
一家美国公司,和一家中国车企,不这样认为。
体面,太体面了
除了蛇形机械臂本身的制造难度外,自动充电机器人还有以下三个维度的考验:
*,如果提供的是公共充电服务,那么不同车型的充电口位置不同,充电盖开启协议不同,充电需求也不同。这就要求机器人先得自动识别出这台车,再对当前的电池状态进行读取,最后根据车辆 BMS 的设定,确定充电模式和速度,最终实现快速满电。
根据电动汽车自动充电机器人产品和服务提供商享奕科技公布的数字,自动充电机器人充电口的定位精度应达到 0.2mm ,就是说机器人相对车辆的空间位姿精度达到 0.2 mm,角度应达到 0.1° 。从充电口定位到插拔完成时间小于 30 秒,插拔成功率高于 98% ,使用寿命高于 8 年,能在零下 30℃ 甚至更低的环境下正常工作。
第二,复杂环境下,充电口的精确识别与定位难度会大幅提升,比如在光线环境不佳的地库、下着大雨的深夜,浓雾遍布的清晨等,都对自动充电机器人图像识别与定位算法的稳定性有极高要求;
第三,自动充电机器人在拔插充电枪时动作是否“温柔”。每台纯电车充电口的位置和角度不尽相同,如果控制算法不够先进,拔插动作不够丝滑,轻则会造成充电枪、充电口的非正常磨损,重则直接折断充电枪,造成安全事故。
当然,办法总比困难多。
固定在基座上的自动充电机器人对车辆停车的准确性要求很高,以此出发,市面上出现了两种解决方案。
*种是来自美国充电技术公司 EV Safe Charge 推出的 ZiGGY 移动充电机器人,它的设计理念是少动枪,多动桩,即:The EV charger that comes to you.
本质上, ZiGGY 是装有四个轮子的超大号移动充电宝。用户在手机上下单后, ZiGGY 会提前驶入该停车场,并预先占据一个车位,识别车位编号后,将具体位置发还。用户只需把车停到指定车位, ZiGGY 就会紧挨着你的车停好。接着,你从 ZiGGY 上取下充电枪,把它插到你的车上进行补能。
虽然最终的插枪操作,依然要真实的人类来完成,不怎么先进,但考虑到 ZiGGY 会抢车位,也算一功抵一过了。毕竟在一二线城市和节假日的高速服务区,一个来即能停的车位远比一把充电枪来得金贵。
考虑到充电盈利微薄,ZiGGY 还在车身两侧搭载了两块超大号液晶屏,除了显示基础的充电服务信息外,还可以接广告恰饭养活自己。
利用类似”少动枪,多动桩“思路打造的,还有来自远景动力的摩奇充电机器人(MOCHI)。相比 ZiGGY ,摩奇更先进的点在于全程”无接触“,手机下单,服务区域内的充电机器人接单,开始找车,找到后自动拔枪充电,完成后自动拔枪开走。根据远景动力公开的数据,摩奇充电 2 小时,可以增加约 600 公里续航。
这种方案的逻辑底座是”桩位分离“,非常适合一些无法增加固定式充电桩的老旧建筑(办公室、商场或公寓大楼)。且完全不需要费钱、费力、耗时的基建、安装和维护, ZiGGY 没电了,会自己找地方”喂饱“自己,运营商要做的*维护,可能就是给那两块大屏幕擦擦指纹印。
第二种是汽车公司更倾向选择的”桩位一体“。
比如理想汽车最近公布的自动充电机器人,就是在自建充电站内,先用自主泊车 AVP (Automated Valet Parking)技术,让车遵照预先设定好的位置,精准停入车位,随后充电机器人从桩内伸出,充电枪前端进行一次 90 度弯折,对准车辆充电口,实施充电。完成后,自动拔出充电枪,自动结算。
从公布的 CG 动画来看,理想汽车没有选择难度极高的蛇形机械臂,而是采用成本不低,但还是能量产的六自由度协作关节机械臂。这与路特斯在今年5 月公布的全球*款量产“闪充机器人”充电桩在机械臂模块上的选择思路异曲同工。
路特斯方案的不同点在于,它有一个可横向伸缩机械臂的底座,还在地面上配载了供充电系统移动的轨道,以此来适应不同品牌车辆的充电口位置和停车状态。
从用户体验上看,自动充电机器人无疑当下最体面的方式。相比加油,全程不用下车,有”人“帮你插;相比换电,省去特地开到固定场所的时间,在停车场就能灵活搞定;相比“一键加电”,不用担负”摇人过来只做件小事“的心理愧疚感。
不信你找找,还有比自动充电机器人对纯电车用户更友好的补能方案吗?
写在最后
体面归体面,友好归友好,灵活归灵活,但自动充电机器人注定无法成为解决用户充电焦虑的主流方案,最多是个补充。
它四处可去,但单机储能上限低,比如大众汽车推出的充电器人电池容量只有 25 度,充一台 100 度电池容量的车,至少得换四个机器人;
它机动性强,但由此带来的维护成本,比固定充电桩高。加上,机器人本身到处跑就得耗电,为它充电就要另外付钱,这些成本最终会转嫁到用户身上,导致单次补能成本高的令人难以接受。
如果说,充个电中途多换几个机器人,电动车主还能勉强接受的话(毕竟节假日充电一排就是 2 小时起步),那呼唤一次机器人花钱更多,电动车主指定不愿意买单。
毕竟,买电车的人,可都是主打实用主义的价格敏感型用户。
【本文由投资界合作伙伴虎嗅网授权发布,本平台仅提供信息存储服务。】如有任何疑问,请联系(editor@zero2ipo.com.cn)投资界处理。




